Des robots qui imitent les sauts des Gerris
Tout le monde a vu dans la nature des petits insectes, les Gerris, « patiner » sur la surface d’eaux calmes. Les pattes des Gerris sont hydrophobes. La dépression de l’eau à leur contact crée une composante de force verticale due à la tension superficielle de l’eau. Celle-ci compense le poids de l’animal et permet son équilibre en surface. Plus extraordinaire encore, les Gerris peuvent sauter à partir de la surface de l’eau en développant une grande vitesse au décollage. Une équipe internationale (Corée, USA, Pologne) de chercheurs a analysé complètement ce mouvement et a construit de petits insectes robots capables d’effectuer des sauts analogues.

Fig. 1. Photographies de Gerris à la surface d’une mare. Vue de haut et vue latérale. On observe bien les creux sous les pattes hydrophobes. On remarque les trois paires de pattes (comme chez tous les insectes). Ce sont les deux paires médiane et arrière qui servent principalement à la locomotion et aux sauts. Crédit Wikipedia. CCL.
L’équilibre des Gerris à la surface de l’eau
Les Gerris, insectes d’une taille de 10 à 15 mm, patinent aisément à la surface de l’eau grâce, d’une part à leur faible masse, d’autre part aux propriétés hydrophobes de leurs pattes. Sous le poids du Gerris, l’eau se creuse sous ses pattes. Il en découle deux forces dirigées vers le haut, l’une, Fa est proportionnelle au volume d’eau déplacé (poussée d’Archimède), l’autre Ft, est dûe au fait que la force de tension superficielle de l’eau en ce point comporte une composante verticale dirigée vers le haut en raison de la courbure de la surface de l’eau sous les pattes. L’ensemble de ces deux forces compense exactement le poids de l’insecte.
A l’interface avec un gaz, par exemple, les molécules ont une énergie d’interaction différente. Cela transforme l’interface en une surface élastique qui réagit à toute déformation. Il existe en tout point de la surface des forces tangentielles à celle-ci qui s’équilibrent et tendent à minimiser l’aire de la surface.
Si la tension superficielle de l’eau est diminuée, par exemple par des polluants ou un détergent, les Gerris coulent. En raison de cela la présence de ces insectes sur des rivières ou des étangs est un gage de non-pollution.
Le mécanisme de propulsion de ces insectes est bien connu. Ils frappent la surface avec leur paire de pattes médiane en guise d’avirons. A l’œil nu, on n’observe que des rides se propageant en arrière, dues à des ondes de surface. Une analyse plus poussée des écoulements révèle qu’ils sont assortis de l’émission de paires de tourbillons sous la surface.
Les sauts verticaux des Gerris
Les Gerris ne se déplacent pas qu’à l’horizontale, ils peuvent sauter verticalement à partir de l’eau aussi haut qu’à partir du sol. En cas de danger, ils effectuent des sauts extrêmement élevés à l’atterrissage aléatoire. Les images obtenues avec une caméra rapide (1000 images/s) révèlent que ces insectes se projettent vers le haut en repoussant vers le bas la surface de l’eau et en rapprochant deux de leurs paires de pattes. Lors de ces sauts, les mesures ont montré que la force de tension superficielle domine les autres forces hydrodynamiques, dues à la poussée d’Archimède et au frottement visqueux.
La vidéo suivante montre l’un de ces sauts d’une dizaine de centimètre de haut.
[jwplayer mediaid= »20397″]Extrait de » Jumping on water: Surface tension–dominated jumping of water striders and robotic insects Je-Sung Koh, Eunjin Yang, Gwang-Pil Jung, Sun-Pill Jung, Jae Hak Son, Sang-Im Lee, Piotr G. Jablonski, Robert J. Wood, Ho-Young Kim, Kyu-Jin Cho Science, 31 Avril 2015: Vol. 349, no. 62-47, pp. 517-521 S-I avec la permission de AAAS ».
L’analyse de ces images montre les caractéristiques suivantes :
-le Gerris maintient le bout de ses pattes hydrophobes dirigé vers le haut pour ne pas percer le ménisque d’eau.
-Il augmente au début le volume d’eau déplacé.
– il fait tourner les unes vers les autres ses pattes en les rapprochant durant le saut plutôt que de simplement les pousser vers le bas. Ses pattes restent alors au contact d’une surface d’eau peu perturbée.
-La force par unité de longueur exercée par les pattes s’approche sans la dépasser d’une valeur de 144mN/m, double de celle de la tension superficielle de l’eau, valeur maximum de ce que peut supporter la surface de l’eau avant d’engloutir les pattes.
Tout cela permet à l’insecte d’atteindre une vitesse au décollage d’environ 1m/s.
La réalisation de robots sauteurs sur le modèle des Gerris
Ces observations et mesures ont permis de définir ce qui était nécessaire pour la construction de robots. Des pattes recouvertes d’un enduit super hydrophobe et une faible masse sont propices à une forte accélération et à une utilisation optimum de la tension superficielle. On a soigneusement limité la force agissant sur les pattes du robot pour que la force par unité de longueur soit inférieure à 144 mN/m. Le robot (Fig.2.) utilise un mécanisme de catapulte formé de matériaux composites (pour leur légèreté) et est mû par un actuateur en alliage à mémoire de forme (AMF) en nickel titane (Nitinol) agissant sur une charnière. L’actuateur, de 80 µm de large sur 100µm de long et d’une masse de 1mg, est excité par un fin fil de chauffage placé juste sous le corps du robot. Ce dernier a une masse de 68 mg à comparer aux quelques 40 mg de l’insecte.

Fig.2. Fabrication des robots.
A) Découpage par usinage laser ultraviolet de chacune des couches de matériau composite.
B) Laminage par pressage à chaud.
C) Découpe finale au laser UV.
D) Pliage et mise en forme.
E) Mise en place de l’actuateur à mémoire de forme.
F) Fixation des pattes en fils recouverts de substances super hydrophobes.
Extrait de » Jumping on water: Surface tension–dominated jumping of water striders and robotic insects Je-Sung Koh, Eunjin Yang, Gwang-Pil Jung, Sun-Pill Jung, Jae Hak Son, Sang-Im Lee, Piotr G. Jablonski, Robert J. Wood, Ho-Young Kim, Kyu-Jin Cho Science, 31 Avril 2015: Vol. 349, no. 62-47, pp. 517-521 S-I avec la permission de AAAS ».
Les expériences montrent que les robots sautent à partir de la surface de l’eau sans rompre la surface libre de l’eau et sans faire de grandes éclaboussures. Ils atteignent une vitesse verticale de 1,6 m/s et une hauteur de 142 mm. Ces robots ont même des vitesses au décollage plus élevées quand ils sautent à partir de l’eau qu’à partir du sol.

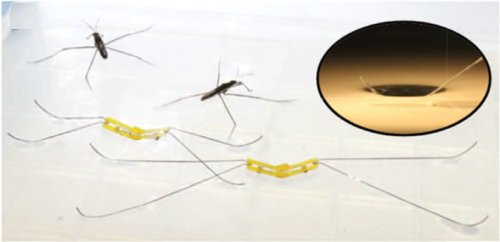
Fig.3. Deux robots sauteurs aux pattes de longueurs différentes mis sur l’eau à côté de deux Gerris. Dans l’insert figure une vue du creux créé à la surface de l’eau par les pattes enduites d’une substance hydrophobe, creux qui supporte le poids du robot. Extrait de » Jumping on water: Surface tension–dominated jumping of water striders and robotic insects Je-Sung Koh, Eunjin Yang, Gwang-Pil Jung, Sun-Pill Jung, Jae Hak Son, Sang-Im Lee, Piotr G. Jablonski, Robert J. Wood, Ho-Young Kim, Kyu-Jin Cho Science, 31 Avril 2015: Vol. 349, no. 62-47, pp. 517-521 avec la permission de AAAS ».
On peut voir sur la vidéo suivante un saut réalisé par un tel robot.
Extrait de » Jumping on water: Surface tension–dominated jumping of water striders and robotic insects Je-Sung Koh, Eunjin Yang, Gwang-Pil Jung, Sun-Pill Jung, Jae Hak Son, Sang-Im Lee, Piotr G. Jablonski, Robert J. Wood, Ho-Young Kim, Kyu-Jin Cho Science, 31 Avril 2015: Vol. 349, no. 62-47, pp. 517-521 S-I avec la permission de AAAS ».
La réalisation de ces insectes robots montre qu’il est possible de reproduire les performances des Gerris et se révèle un outil efficace pour vérifier les hypothèses théoriques concernant le rôle dominant des forces de tension superficielle dans la locomotion de ces insectes. Ces avancées en biomécanique peuvent aussi être utiles à la conception d’autres robots.
Pour en savoir plus :
Jumping on water: Surface tension–dominated jumping of water striders and robotic insects Je-Sung Koh, Eunjin Yang, Gwang-Pil Jung, Sun-Pill Jung, Jae Hak Son, Sang-Im Lee, Piotr G. Jablonski, Robert J. Wood, Ho-Young Kim, Kyu-Jin Cho. Science, 31 Avril 2015: Vol. 349,

