Des dispositifs électro-hydrauliques qui imitent les muscles
Les mécanismes conçus par l’homme sont généralement rigides et parfaitement adaptés à des tâches répétitives. Au contraire les organismes vivants utilisent plutôt des matériaux déformables qui peuvent s’adapter en douceur à l’environnement. Dans le cas de la robotique, on cherche à obtenir par des dispositifs appelés des « actionneurs » des mouvements doux et progressifs adaptés aux systèmes biomédicaux, à l’automatisation industrielle et à nombre d’autres applications. On a utilisé jusqu’ici dans ce but des élastomères diélectriques ou des systèmes hydrauliques. Les premiers se déforment sous l’effet d’une tension appliquée mais sont parfois hors d’usage à la suite de courts-cicuits. Les seconds nécessitent tout un ensemble de tuyaux diminuant vitesse et efficacité. Des chercheurs de l’Université du Colorado, Boulder, USA, ont imaginé des actionneurs ressemblant aux muscles qui combinent les avantages des systèmes hydrauliques et des systèmes diélectriques sans présenter leurs inconvénients.
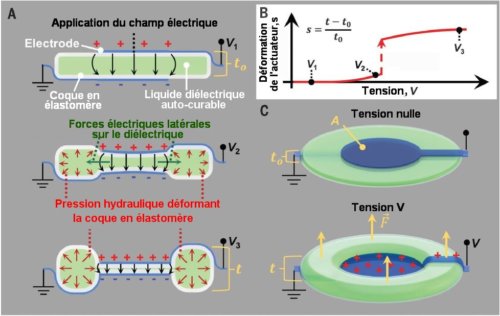
Le dispositif consiste en une coque en élastomère munie de deux électrodes extérieures et remplie d’un diélectrique liquide (Fig.1.).
L’application d’une tension sur les électrodes induit un champ électrique dans le liquide et l’élastomère, tous deux diélectriques. Il en résulte des forces qui augmentent la pression entre les électrodes et déplacent le liquide vers l’extérieur. Les scientifiques ont appelé ce type d’actionneur HASEL (pour en anglais, hydraulically amplified self-healing electrostatic, soit un actionneur électrostatique auto-curable à amplification hydraulique )
Le terme auto-curable fait allusion à une précieuse propriété des diélectriques liquides. Elle permet l’auto-guérison des claquages électriques (courts-circuits) pouvant s’y produire car, à la différence des solides diélectriques où ces dommages restent permanents, les liquides diélectriques redeviennent isolants après la décharge.

Fig.1 Composants de base et mécanisme physique des nouveaux actionneurs
A) Schéma d’un actionneur HASEL soumis à 3 différentes tensions, V1<V2<V3.
B) Réponse d’un actionneur HASEL ayant la géométrie indiquée en A)
C) L’actionneur se déforme et prend l’aspect d’un tore sous l’effet de la tension appliquée. Cette déformation contrôlée par la tension peut être exploitée pour appliquer une force sur un objet extérieur.
Reproduit de Hydraulically amplified self-healing
electrostatic actuators with muscle-like performance
E. Acome, S. K. Mitchell, T. G. Morrissey,M. B. Emmett, C. Benjamin, M. King,
M. Radakovitz, C. Keplinger. Science 359, 61–65 (2018) avec autorisation.
Les produits employés pour réaliser ce type d’actionneur sont courants : du PDMS (polydiméthylsiloxane), élastomère silicone, pour la coque, une huile de transformateur d’origine végétale pour le diélectrique liquide et des hydrogels conducteurs en PAM (polyacrylamide) ionisé pour les électrodes.
Les actionneurs munis d’électrodes de grand diamètre par rapport au diamètre total du dispositif (Fig.2.a) déplacent plus de liquide, ce qui donne une plus grande déformation et une force plus petite que les actionneurs ayant des électrodes de diamètre plus petit (Fig.2.b), qui fournissent une plus faible déformation, mais une force plus élevée.
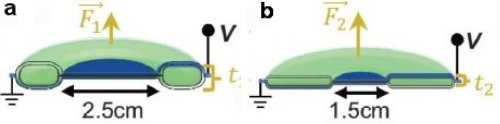
Fig.2 Influence de la surface relative des électrodes sur la déformation et la force
a) Electrodes de grand diamètre, forte déformation, faible force.
b) Electrodes de petit diamètre, faible déformation, force élevée.
Reproduit de Hydraulically amplified self-healing electrostatic actuators with muscle-like performance E. Acome, S. K. Mitchell, T. G. Morrissey,M. B. Emmett, C. Benjamin, M. King, M. Radakovitz, C. Keplinger. Science 359, 61–65 (2018) avec autorisation.
La durée de vie d’un actionneur du dernier type a été testée, elle est remarquable : un dispositif à petites électrodes a conservé toutes ses propriétés après avoir subi plus d’un million de cycles en soulevant une masse de 150 g .
On peut empiler plusieurs de ces actionneurs. Avec 5 d’entre eux, on obtient un système équivalent à un muscle avec un déplacement de 7 mm.
Les chercheurs de Boulder ont aussi réalisé des actionneurs à géométrie plane. On leur applique un pré-étirage aux extrémités avant de suspendre une masse dans une direction perpendiculaire. (Fig. 3. ci-dessous). Le pré-étirage latéral entraîne une extension préférentielle dans la direction de la force de traction quand on applique une tension. Les électrodes d’un actionneur HASEL forment un condensateur dont la capacité est directement liée à la déformation de celui-ci. Ces actionneurs permettent donc de mesurer la déformation due à des forces extérieures ou à la tension appliquée.
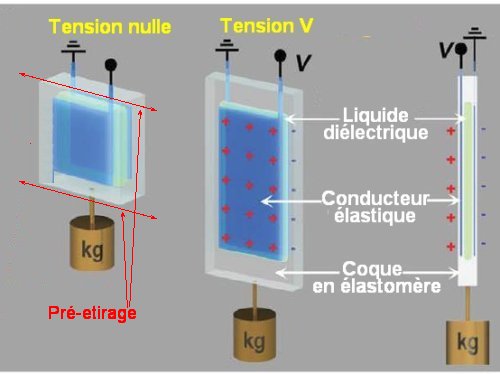
Fig. 3. Schéma d’un actionneur HASEL à géométrie plane
Reproduit de Hydraulically amplified self-healing
electrostatic actuators with muscle-like performance
E. Acome, S. K. Mitchell, T. G. Morrissey,M. B. Emmett, C. Benjamin, M. King,
M. Radakovitz, C. Keplinger. Science 359, 61–65 (2018) avec autorisation.
La vidéo suivante montre un bras de robot entraîné par deux actionneurs HASEL à géométrie plane montés en parallèle.
[jwplayer mediaid= »23218″]
La courbe en rouge représente la somme de la tension appliquée et de celle due à la mesure de la déformation. La courbe en vert représente la capacité des actionneurs.
A tension nulle, on peut observer la variation de capacité quand on fait bouger manuellement le bras. On peut aussi voir sa valeur quand on charge le bras avec une balle de tennis (60 g) ou une balle de base-ball (125 g). La tension maximum appliquée est de l’ordre de 10 kV.
Tiré de Supplementary materials for Hydraulically amplified self-healing electrostatic actuators with muscle-like performance Acome, S. K. Mitchell, T. G. Morrissey,M. B. Emmett, C. Benjamin, M. King, M. Radakovitz, C. Keplinger. Science 359, 61–65 (2018) avec autorisation
{En cas de problème pour lire cette vidéo avec le navigateur EDGE sur Windows 10, autoriser Adobe Flashplayer : cliquer sur le symbole” i dans O ” à gauche de l’adresse web puis sur autoriser Adobe Flash}
Ces actionneurs HASEL sont robustes, ils ont des performances de l’ordre de celles des muscles et ils ont des géométries diverses. On les obtient à partir de matériaux très courants à l’aide de techniques de fabrication très simples. La coque en élastomère épaisse (1 mm) utilisée pour le momentpar les chercheurs nécessite d’utiliser de hautes tensions pour obtenir une déformation suffisante. Cette limitation pourra être surmontée par l’emploi de couches de plus forte constante diélectrique et de techniques de fabrication plus sophistiquées aboutissant à produire des structures diélectriques ayant des épaisseurs de l’ordre de 10µm. A condition d’utiliser matériaux et techniques de pointe, les actionneurs de type HASEL ouvrent une voie nouvelle au développement d’actionneurs imitant les muscles, dispositifs auxquels s’offriront une foule d’applications.
Pour en savoir plus :
Hydraulically amplified self-healing electrostatic actuators with muscle-like performance
Acome, S. K. Mitchell, T. G. Morrissey,M. B. Emmett, C. Benjamin, M. King, Radakovitz, C. Keplinger. Science 359, 61–65 (2018)

