
Un mécanisme de « Godille » inspiré par la nage des manchots
Les manchots sont d’étranges oiseaux qui habitent l’hémisphère sud et ne peuvent voler. Ils ne sont pas non plus renommés pour la rapidité de leur déplacement sur terre, mais ils sont d’excellents nageurs et on a parfois comparé leur jaillissement hors de l’eau à celui d’une fusée. Ils se propulsent avec leurs ailes par un mouvement de « godille » semblable à celui utilisé par les marins pour faire avancer une embarcation avec un seul aviron. Flavio Noca et deux chercheurs de l’HEPIA ( Haute école du paysage, d’ingénierie et d’architecture de Genève) en Suisse, ont, en s’inspirant de cela, mis au point un mécanisme d’articulation sphérique qui permet, à partir d’un axe d’entraînement rotatif, d’obtenir un mouvement semblable à celui de l’aile du manchot. Un tel mouvement a une grande efficacité pour la propulsion marine mais il permet aussi de contrôler la direction de la poussée, à la différence des hélices.

Fig. 1 Vue d’un manchot en nage subaquatique.
Crédit Wikipedia Commons.
L’articulation de l’aile du manchot
L’aile du manchot constitue une véritable pale. Son articulation à l’épaule permet de fixer son angle d’incidence, l’angle α, (Fig.2), de déterminer l’amplitude du battement de bas en haut de l’aile par l’angle β et enfin celle du mouvement d’aviron par l’angle γ. Ces angles dits d’Euler constituent un système de coordonnées à trois dimensions.

Fig.2 Angles d’Euler et repérage du mouvement tridimensionnel
de l’aile du manchot. Crédit F. Noca.
L’articulation mécanique sphérique réalisée
Le dispositif réalisé est un système mécanique, une articulation sphérique (elle possède la faculté de s’orienter dans toutes les directions de l’espace à trois dimensions). Mais, en outre, à la différence de l’articulation de l’épaule du manchot, elle a la propriété de permettre une rotation continue autour d’un axe principal. Ceci permet d’entraîner le système mécanique avec des moteurs conventionnels rotatifs.
A gauche de la figure 3, on a figuré un schéma du mécanisme : on remarque, en jaune, bleu et rouge les trois engrenages coaxiaux d’entraînement. Selon les positions relatives de ces pignons, la platine supérieure peut prendre n’importe quelle orientation (α, β, γ) dans l’espace à trois dimensions, on dit qu’elle a trois degrés de liberté.
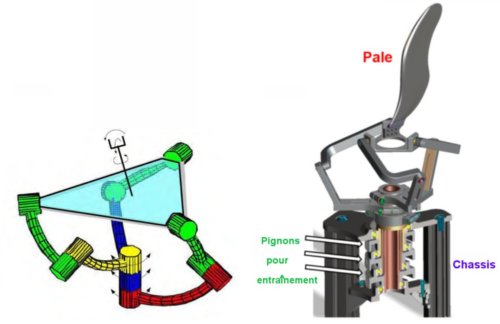
Fig. 3. A gauche: schéma du système d’articulation
A droite: vue du mécanisme complet avec pale et engrenages. Crédit F. Noca.
Si on voulait utiliser un tel système de propulsion sur un navire, ce serait dans le but d’obtenir une manœuvrabilité maxima. En installant deux tels mécanismes à trois degrés de liberté, on pourrait contrôler le déplacement du navire avec six degrés de liberté, ce qu’on ne pourrait obtenir autrement que par l’utilisation de six hélices ou propulseurs classiques.
La vidéo ci-dessous montre les essais dans un bassin du système de propulsion.
[jwplayer mediaid= »15217″] Crédit F. Noca
Le mécanisme réalisé peut fonctionner à une fréquence d’environ 2,5 Hz, il peut prendre toute orientation autour de son axe principal et son mouvement s’effectue dans un cône de ±60°. Il reproduit fidèlement les mouvements mécaniques de l’aile du manchot, mais on n’a pas encore compris toutes les subtilités de la nage de celui-ci, en particulier l’exploitation qu’il fait des tourbillons générés par le frottement de l’aile dans l’eau.
Ce modèle mécanique, outre son application possible à la propulsion de navires, permettra peut-être de percer les mystères de ces véritables fusées sous-marines que constituent les manchots.
Pour en savoir plus :
Marine Propulsor based on a Three-Degree-of-Freedom Actuated Spherical Joint
Bassem Sudki, Michel Lauria, Flavio Noca
Third International Symposium on Marine Propulsors , Launceston, Tasmania, Australia May 2013

