Quand un filet de miel liquide dessine de subtiles figures
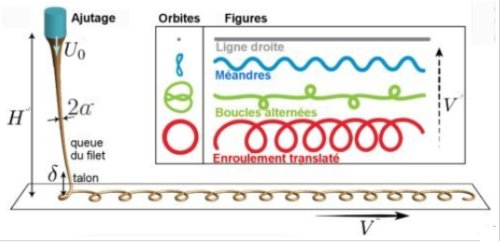
Nous avons tous observé qu’un filet de miel formait en s’écoulant un curieux enroulement, approximativement circulaire, à son arrivée sur une surface. Ce phénomène, d’importance dans l’étude des écoulements, est a priori gouverné par la viscosité du liquide, son inertie et la force de gravité. Si un filet de fluide visqueux s’écoule sur une courroie mobile, les figures obtenues ressemblent beaucoup à celles des divers points qu’on obtient avec une machine à coudre. C’est pour cela que les premiers expérimentateurs à s’intéresser au phénomène l’ont appelé « machine à coudre de la mécanique des fluides » (en anglais, « fluid mechanical sewing machine », abrégé en FMSM).
Des chercheurs de l’université Paris 6, Institut Jean le Rond d’Alembert, de l’université d’Orsay, laboratoire FAST, et leurs collègues de l’University of Cambridge, UK ont mis au point un modèle très simple résoluble analytiquement qui reproduit bien les figures observées et leur ordre d’apparition en fonction de la vitesse de la courroie.
On a observé expérimentalement ces figures et l’on voit ci-dessous (Fig.1.B) la diversité des comportements obtenus suivant la vitesse de la courroie.
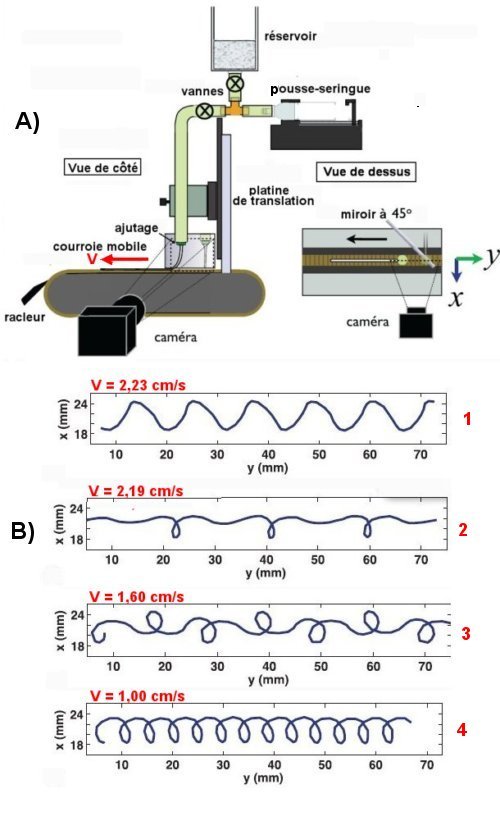
Fig.1. A) Schéma de l’appareillage de la « machine à coudre de la mécanique des fluides ». Le liquide sort de l’ajutage de sortie à une vitesse verticale constante Uc grâce à un pousse-seringue.
B) Figures obtenues avec des vitesses différentes de la courroie sur laquelle aboutit le jet de liquide visqueux. La vitesse V de la courroie mobile varie de 2,23 cm/s à 1 cm/s.
Adapté avec permission de Robert L. Welch, Billy Szeto, and Stephen W. Morris, PHYSICAL REVIEW E 85, 066209 (2012). © 2012 par APS.
Lorsqu’on diminue la vitesse de la courroie mobile à partir des valeurs qui ne donnent qu’une figure de ligne droite, on observe quatre régimes successifs :
- à forte vitesse, on observe des méandres, Fig 1.B)-1 .
- puis, à plus faible vitesse, des boucles d’un seul côté, Fig.1 B)-2.
- ensuite,des boucles alternées, Fig.1. B)-3
- enfin, un enroulement translaté, Fig. 1.B)-4.
Le modèle théorique proposé par les chercheurs de Paris, Orsay et Cambridge permet d’interpréter analytiquement ces phénomènes. Il prédit, en particulier, le rayon de la boucle circulaire observée sur une surface fixe et la fréquence Ω de formation des boucles, mais aussi les différents modes observés quand on varie la vitesse de la courroie mobile (Fig.3.). Il explique pour la première fois que les fréquences observées sur les différentes figures de FMSM soient des multiples simples de la fréquence Ω.
Ce modèle est basé sur l’hypothèse que l’on peut négliger l’inertie dans ce phénomène. Avant de le construire, les chercheurs ont effectué des simulations numériques directes basées sur la géométrie différentielle d’un filet visqueux en négligeant l’inertie du fluide, Fig.2.
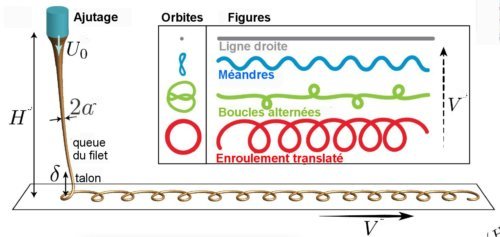
Fig.2. Courbes obtenues par simulation numérique en négligeant l’inertie par P.T. Brun et al. Les orbites représentent les trajectoires du filet visqueux au contact de la courroie vues de son référentiel. Adapté avec permission de P.-T. Brun, Basile Audoly, Neil M. Ribe, T. S. Eaves, and John R. Lister,
PHYSICAL REVIEW E 77, 066218 _2008 © 2015 par APS.
Les résultats des simulations sont en excellent accord avec les observations expérimentales et montrent que les termes d’inertie peuvent être négligés.
Le fait de négliger l’inertie a donc permis à P.T. Brun et al. de construire un modèle théorique simple qui permet de déterminer entièrement les caractéristiques observées. Ce modèle quasi statique est appelé modèle géométrique. Le filet est modélisé comme un filament de rayon uniforme tombant sur la courroie à une vitesse Uc et se courbant en se déplaçant sur celle-ci quasi statiquement. Le modèle se réduit à trois équations différentielles couplées qui ne dépendent que d’un seul paramètre Uc /V et qui se résolvent facilement.
On compare ci-dessous, Fig. 3. les orbites et les figures correspondantes obtenues par le modèle géométrique (en vert) et par simulation(en brun).
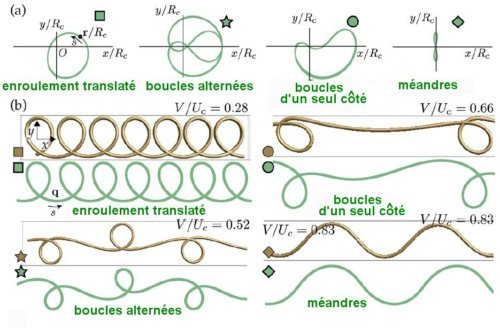
Fig.3. Comparaison des orbites (a) et figures (b) correspondantes obtenues,
en vert, avec le modèle géométrique et, en brun, par simulation. . Adapté avec permission de P.T. Brun, Basile Audoly, Neil M. Ribe, T. S. Eaves, and John R. Lister, PHYSICAL REVIEW E 77, 066218 _2008 © 2015 par APS.
Le modèle géométrique explique toutes les figures observées dans les expériences comme dans les simulations ainsi que l’ordre dans lequel elles surviennent.
De telles figures d’enroulement du filet visqueux se retrouvent dans nombre de situations ordinaires et dans des processus industriels comme la production de textiles non tissés, la décoration de pâtisseries et même dans la pose de câbles sous-marins, dont les caractéristiques sont plutôt élastiques que visqueuses.
Le modèle géométrique fournit une étude de l’évolution de la position du point de contact en tenant compte de l’orientation du filet par rapport à la courroie. Pouvoir moduler orientation et position latérale de l’ajutage ou de la courroie pourrait fournir une alternative aux méthodes de l’impression 3 D et des avancées dans la fabrication de textiles artificiels.
Pour en savoir plus :
Liquid Ropes: A Geometrical Model for Thin Viscous Jet Instabilities
P.-T. Brun, Basile Audoly, Neil M. Ribe, T. S. Eaves, and John R. Lister
PHYSICAL REVIEW E 77, 066218 _2008
_
Meandering instability of a viscous thread
Stephen W. Morris, Jonathan H. P. Dawes, Neil M. Ribe, and John R. Lister
PHYSICAL REVIEW E 77, 066218 _2008_

_500_f")

